Optimiser la navigation intérieure des robots grâce aux chercheurs de CESI LINEACT

Dans cette page :
- Les défis de la localisation en intérieur
- Une navigation autonome fiable, même dans des environnements changeants
- CESI, à la pointe de l’innovation en robotique
- TIAGo++ : Plus qu’un simple robot, un outil pédagogique et de recherche
- Vers un futur où les robots seront omniprésents
- Les enseignants-chercheurs impliqués sur ce projet
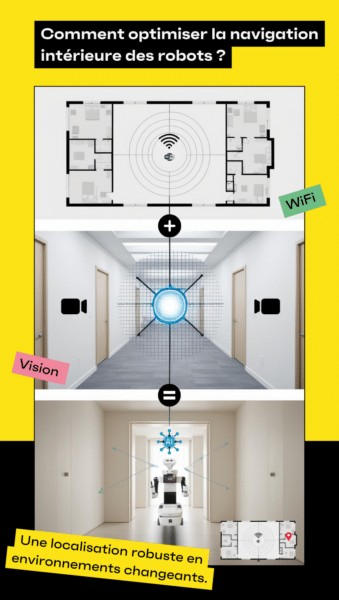
Imaginez un robot capable de se repérer seul à l’intérieur d’un bâtiment complexe comme un campus universitaire ou un hôpital, en utilisant uniquement des équipements déjà en place ou faciles à déployer. C’est le défi relevé par des chercheurs du laboratoire CESI LINEACT.
En combinant de manière innovante les signaux Wi-Fi et la vision par caméra, Yuehua Ding, pilote de cette recherche, et son équipe ont mis au point une méthode qui permet à ces machines de naviguer même dans des environnements en constante évolution et sans a priori sur la position initiale. Une avancée qui ouvre de nouvelles perspectives pour l’intelligence et l’autonomie des robots.
Les défis de la localisation en intérieur
La localisation en intérieur reste l’un des plus grands défis pour la robotique. Contrairement aux environnements extérieurs, où le GPS assure une précision suffisante pour la navigation, les bâtiments bloquent ou perturbent les signaux GPS. De ce fait, les robots doivent recourir à d’autres méthodes, notamment des technologies visuelles et radio pour se repérer.
- Les méthodes visuelles s’appuient sur des caméras pour capturer des images de l’environnement, qui sont ensuite analysées par des algorithmes d’intelligence artificielle (IA) pour identifier des points de repère et localiser le robot. Il s’agit de méthode sensibles aux variations d’environnements.
- Les méthodes radio, exploitent la puissance du signal de bornes dans le bâtiment pour estimer la position du robot. Le Wi-Fi est déjà omniprésent, mais sa précision seule reste limitée à cause des fluctuations des signaux. D’autres méthodes basés radio existent mais nécessitent l’installation d’infrastructure spécifique pouvant être complexes et onéreuses.
- Les méthodes Laser (Lidar) : basés sur des capteurs spécifiques, ces méthodes donnent un bon niveau de précision mais nécessite un connaissance initiale fine de la position du robot et peuvent être sensible à des variations d’environnements.
CESI, à la pointe de l’innovation en robotique
Cette innovation témoigne du dynamisme de la recherche à CESI, notamment au sein de son laboratoire CESI LINEACT. Les enseignants-chercheurs vont au-delà de l’étude des technologies existantes en créant des synergies entre l’intelligence artificielle, la robotique et les systèmes de communication, tout en plaçant l’humain au cœur du processus de production.
Cette approche démontre la capacité de CESI à anticiper les enjeux de l’industrie 5.0 et à former les ingénieurs de demain autour de projets concrets et à fort impact.
TIAGo++ : Plus qu’un simple robot, un outil
pédagogique et de recherche
Avec six robots TIAGo++ répartis sur ses campus, CESI met à la disposition de ses étudiants et chercheurs des technologies de pointe. Ces robots humanoïdes ne sont pas de simples machines : ils deviennent de véritables partenaires de formation, de recherche et d’innovation. Ils offrent aux étudiants l’opportunité de développer des compétences concrètes en programmation et en interaction homme-machine, tout en constituant une plateforme idéale pour les chercheurs souhaitant explorer de nouvelles voies en robotique autonome.
Le choix du TIAGo++ pour ces recherches est particulièrement pertinent. Sa conception ouverte permet une grande flexibilité, facilitant la modification de ses algorithmes, un avantage significatif par rapport à d’autres robots plus fermés. De plus, avec sa base mobile et ses bras articulés, il offre une excellente polyvalence, rendant les expérimentations en robotique autonome et interaction physique beaucoup plus fluides.
Vers un futur où les robots seront omniprésents
Cette avancée technologique propulse la robotique vers de nouvelles frontières. Les applications potentielles sont nombreuses : des robots de livraison dans les centres commerciaux, des robots d’assistance dans les hôpitaux, ou encore des systèmes de guidage autonome dans les bâtiments publics.
Grâce à cette innovation, les robots pourraient devenir des partenaires fiables et intelligents, capables de s’adapter aux environnements intérieurs en constante évolution. En combinant leurs expertises en intelligence artificielle, robotique et communication, les chercheurs de CESI posent les fondations d’une nouvelle ère technologique. Un futur où les robots ne seront pas seulement des machines, mais de véritables partenaires capables d’évoluer dans des environnements complexes avec fluidité et efficacité.
Les enseignants-chercheurs impliqués sur ce projet
Yuehua Ding
Yuehua Ding est enseignant-chercheur et HDR au sein du laboratoire CESI LINEACT basé sur le campus de CESI Strasbourg et spécialisé dans la robotique et la fusion de données pour la localisation des robots d’intérieur. Il se consacre à améliorer l’autonomie et la précision des systèmes robotiques.
Jean-François Dollinger
Jean-François Dollinger est enseignant-chercheur en ingénierie numérique, spécialisé en calculs parallèles, edge computing et IoT. Il enseigne l’algorithmique et la programmation, et s’intéresse à la performance des systèmes informatiques, en particulier à la mise en œuvre efficace de techniques d’IA dans des environnements contraints. Il conçoit également des supports pédagogiques sur le campus de CESI Strasbourg.
Mourad Zghal
Mourad Zghal est titulaire d’une HDR et d’un doctorat en génie électrique. De 1997 à 2021, il a occupé différents postes d’enseignant chercheur et a rejoint CESI Région Est en 2021 en tant que responsable du département recherche. Ses thématiques de recherche incluent les capteurs et l’IoT pour des applications industrielles. Il est élu fellow SPIE et Optica (ex OSA).
Vincent Vauchey
Vincent Vauchey est ingénieur de recherche et innovation à CESI, basé sur le campus de Rouen. Fort de plus de dix ans d’expérience en robotique et véhicules autonomes, il a développé des solutions innovantes utilisant des technologies avancées. Avant cela, il a dirigé des projets en R&D et travaillé comme auto-entrepreneur dans le développement de logiciels.